Enterprise Edition
Timefold Solver Enterprise Edition is a commercial product that offers additional features, such as nearby selection and multi-threaded solving. These features are essential to scale out to huge datasets.
Unlike Timefold Solver Community Edition, the Enterprise Edition is not open-source. You are allowed to use Timefold Solver Enterprise Edition for evaluation and development. Please contact contact Timefold to obtain the credentials necessary to start your evaluation.
For a high-level overview of the differences between Timefold offerings, see Timefold Pricing.
1. Switch to Enterprise Edition
To switch from Timefold Solver Community Edition to Enterprise Edition, first reference the Enterprise Edition Maven repository in your project:
-
Maven
-
Gradle
Add the following repository to your pom.xml:
<project>
...
<repositories>
<repository>
<id>timefold-solver-enterprise</id>
<name>Timefold Solver Enterprise Edition</name>
<url>https://timefold.jfrog.io/artifactory/releases/</url>
</repository>
</repositories>
...
</project>Then create .m2/settings.xml in your home directory with the following content:
<settings>
...
<servers>
<server>
<!-- Replace "my_username" and "my_password" with credentials obtained from a Timefold representative. -->
<id>timefold-solver-enterprise</id>
<username>my_username</username>
<password>my_password</password>
</server>
</servers>
...
</settings>See Settings Reference for more information on Maven settings.
Add the following in your build.gradle:
repositories {
mavenCentral()
maven {
url "https://timefold.jfrog.io/artifactory/releases/"
credentials { // Replace "my_username" and "my_password" with credentials obtained from a Timefold representative.
username "my_username"
password "my_password"
}
authentication {
basic(BasicAuthentication)
}
}
}Having done the above, replace references to Community Edition artifacts by their Enterprise Edition counterparts as shown in the following table:
| Community Edition | Enterprise Edition |
|---|---|
|
|
|
|
|
|
|
|
2. Features of Enterprise Edition
The following features are only available in Timefold Solver Enterprise Edition:
2.1. Nearby selection
|
This feature is a commercial feature of Timefold Solver Enterprise Edition. It is not available in the Community Edition. |
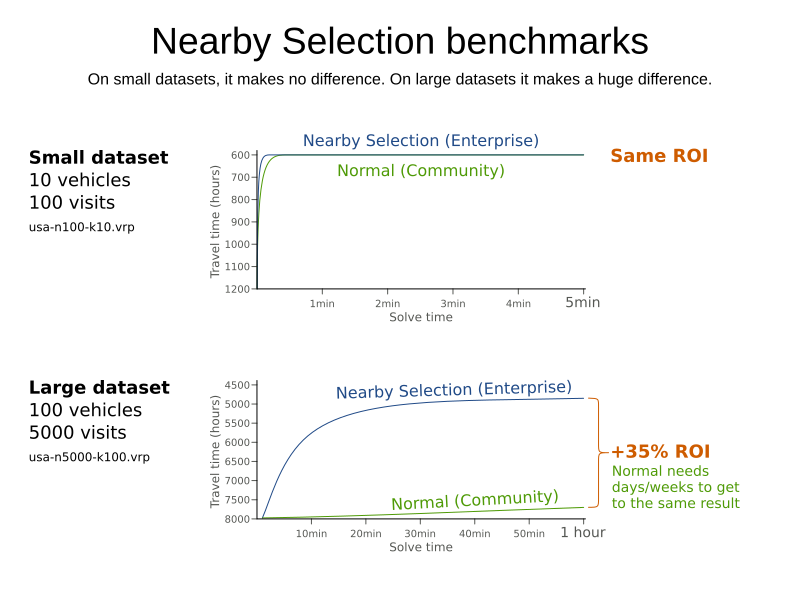
In some use cases (such as TSP and VRP, but also in other cases), changing entities to nearby values or swapping nearby entities leads to better results faster.
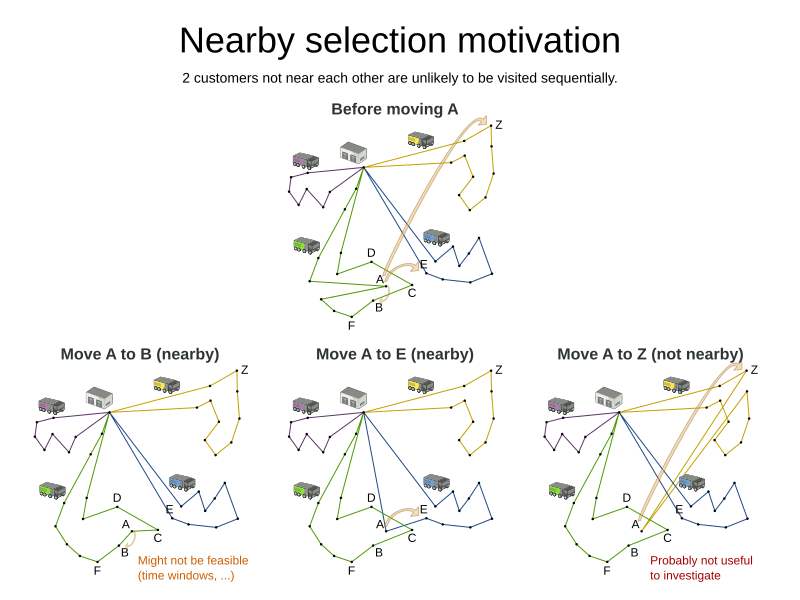
This can heavily increase scalability and improve solution quality:
Nearby selection increases the probability of selecting an entity or value which is nearby to the first entity being moved in that move.
The distance between two entities or values is domain specific.
Therefore, implement the NearbyDistanceMeter interface:
public interface NearbyDistanceMeter<Origin_, Desination_> {
double getNearbyDistance(Origin_ origin, Destination_ destination);
}In a nutshell, when nearby selection is used in a list move selector,
Origin_ is always a planning value (for example Customer)
but Destination_ can be either a planning value or a planning entity.
That means that in VRP the distance meter must be able to handle both Customer and Vehicle as the Destination_ argument:
public class CustomerNearbyDistanceMeter implements NearbyDistanceMeter<Customer, LocationAware> {
public double getNearbyDistance(Customer origin, LocationAware destination) {
return origin.getDistanceTo(destination);
}
}|
|
2.1.1. Nearby selection with a list variable
To quickly configure nearby selection with a planning list variable,
add nearbyDistanceMeterClass element to your configuration file.
The following enables nearby selection with a list variable,
in both local search and construction heuristics:
<?xml version="1.0" encoding="UTF-8"?>
<solver xmlns="https://timefold.ai/xsd/solver">
...
<nearbyDistanceMeterClass>org.acme.vehiclerouting.domain.solver.nearby.CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
...
</solver>By default, the following move selectors are included: Change, Swap, Change with Nearby, Swap with Nearby, and 2-OPT with Nearby.
Advanced configuration for construction heuristics
To customize the behavior of nearby construction heuristics,
add queuedValuePlacer element,
into it add a listChangeMoveSelector element,
further into it add a nearbySelection element in the destinationSelector element
and finally use mimic selection
to specify which destination should be near by the selection.
<queuedValuePlacer>
<valueSelector id="valueSelector1"/>
<listChangeMoveSelector>
<valueSelector mimicSelectorRef="valueSelector1"/>
<destinationSelector>
<nearbySelection>
<originValueSelector mimicSelectorRef="valueSelector1"/>
<nearbyDistanceMeterClass>...CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
</nearbySelection>
</destinationSelector>
</listChangeMoveSelector>
</queuedValuePlacer>Advanced configuration for local search
To customize the move selectors,
add a nearbySelection element in the destinationSelector, valueSelector or subListSelector
and use mimic selection
to specify which destination, value, or subList should be near by the selection.
<unionMoveSelector>
<listChangeMoveSelector>
<valueSelector id="valueSelector1"/>
<destinationSelector>
<nearbySelection>
<originValueSelector mimicSelectorRef="valueSelector1"/>
<nearbyDistanceMeterClass>org.acme.vehiclerouting.domain.solver.nearby.CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
</nearbySelection>
</destinationSelector>
</listChangeMoveSelector>
<listSwapMoveSelector>
<valueSelector id="valueSelector2"/>
<secondaryValueSelector>
<nearbySelection>
<originValueSelector mimicSelectorRef="valueSelector2"/>
<nearbyDistanceMeterClass>org.acme.vehiclerouting.domain.solver.nearby.CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
</nearbySelection>
</secondaryValueSelector>
</listSwapMoveSelector>
<subListChangeMoveSelector>
<selectReversingMoveToo>true</selectReversingMoveToo>
<subListSelector id="subListSelector3"/>
<destinationSelector>
<nearbySelection>
<originSubListSelector mimicSelectorRef="subListSelector3"/>
<nearbyDistanceMeterClass>org.acme.vehiclerouting.domain.solver.nearby.CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
</nearbySelection>
</destinationSelector>
</subListChangeMoveSelector>
<subListSwapMoveSelector>
<selectReversingMoveToo>true</selectReversingMoveToo>
<subListSelector id="subListSelector4"/>
<secondarySubListSelector>
<nearbySelection>
<originSubListSelector mimicSelectorRef="subListSelector4"/>
<nearbyDistanceMeterClass>org.acme.vehiclerouting.domain.solver.nearby.CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
</nearbySelection>
</secondarySubListSelector>
</subListSwapMoveSelector>
</unionMoveSelector>2.1.2. Nearby selection with a chained variable
To quickly configure nearby selection with a chained planning variable,
add nearbyDistanceMeterClass element to your configuration file.
The following enables nearby selection with a chained variable,
in both local search and construction heuristics:
<?xml version="1.0" encoding="UTF-8"?>
<solver xmlns="https://timefold.ai/xsd/solver">
...
<nearbyDistanceMeterClass>org.acme.vehiclerouting.domain.solver.nearby.CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
...
</solver>By default, the following move selectors are included:
-
Swap,
-
Change with Nearby,
-
Swap with Nearby
-
and Tail Chain Swap with Nearby.
Advanced configuration for construction heuristics
To customize the behavior of nearby construction heuristics,
add queuedEntityPlacer element,
into it add a changeMoveSelector element,
further into it add a nearbySelection element in the valueSelector element
and finally use mimic selection
to specify which destination should be near by the selection.
<queuedEntityPlacer>
<entitySelector id="entitySelector1"/>
<changeMoveSelector>
<entitySelector id="entitySelector1"/>
<valueSelector>
<nearbySelection>
<originEntitySelector mimicSelectorRef="entitySelector1"/>
<nearbyDistanceMeterClass>...CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
</nearbySelection>
</valueSelector>
</changeMoveSelector>
</queuedEntityPlacer>Advanced configuration for local search
To customize the move selectors,
add a nearbySelection element in the entitySelector or valueSelector
and use mimic selection to specify which entity should be near by the selection.
<unionMoveSelector>
<changeMoveSelector>
<entitySelector id="entitySelector1"/>
<valueSelector>
<nearbySelection>
<originEntitySelector mimicSelectorRef="entitySelector1"/>
<nearbyDistanceMeterClass>...CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
</nearbySelection>
</valueSelector>
</changeMoveSelector>
<swapMoveSelector>
<entitySelector id="entitySelector2"/>
<secondaryEntitySelector>
<nearbySelection>
<originEntitySelector mimicSelectorRef="entitySelector2"/>
<nearbyDistanceMeterClass>...CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
</nearbySelection>
</secondaryEntitySelector>
</swapMoveSelector>
<tailChainSwapMoveSelector>
<entitySelector id="entitySelector3"/>
<valueSelector>
<nearbySelection>
<originEntitySelector mimicSelectorRef="entitySelector3"/>
<nearbyDistanceMeterClass>...CustomerNearbyDistanceMeter</nearbyDistanceMeterClass>
</nearbySelection>
</valueSelector>
</tailChainSwapMoveSelector>
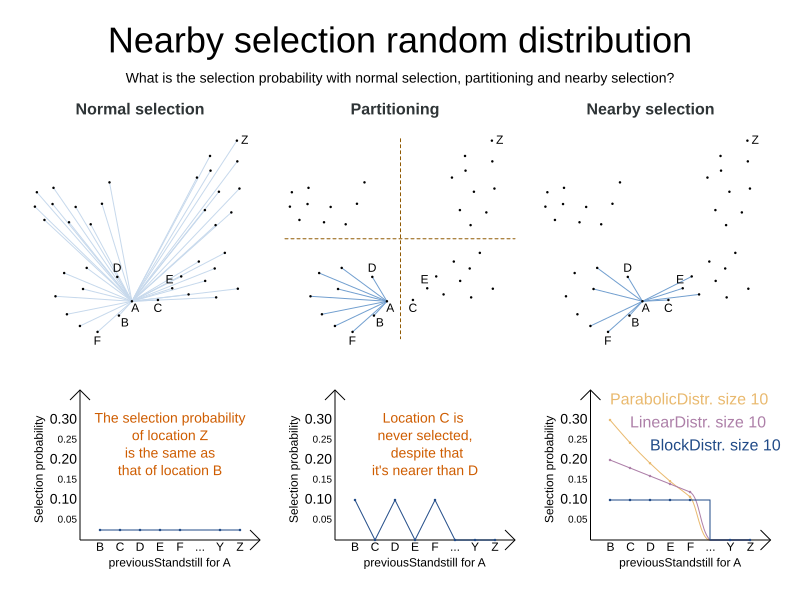
</unionMoveSelector>2.1.3. Power-tweaking distribution type
The solver allows you to tweak the distribution type of the nearby selection, or how likely are the nearest elements to be selected based on their distance from the current.
|
Only tweak the default settings if you are prepared to back your choices by extensive benchmarking. |
The following NearbySelectionDistributionTypes are supported:
-
PARABOLIC_DISTRIBUTION(default): Nearest elements are selected with a higher probability.<nearbySelection> <parabolicDistributionSizeMaximum>80</parabolicDistributionSizeMaximum> </nearbySelection>A
distributionSizeMaximumparameter should not be 1 because if the nearest is already the planning value of the current entity, then the only move that is selectable is not doable. To allow every element to be selected regardless of the number of entities, only set the distribution type (so without adistributionSizeMaximumparameter):<nearbySelection> <nearbySelectionDistributionType>PARABOLIC_DISTRIBUTION</nearbySelectionDistributionType> </nearbySelection> -
BLOCK_DISTRIBUTION: Only the n nearest are selected, with an equal probability. For example, select the 20 nearest:<nearbySelection> <blockDistributionSizeMaximum>20</blockDistributionSizeMaximum> </nearbySelection> -
LINEAR_DISTRIBUTION: Nearest elements are selected with a higher probability. The probability decreases linearly.<nearbySelection> <linearDistributionSizeMaximum>40</linearDistributionSizeMaximum> </nearbySelection> -
BETA_DISTRIBUTION: Selection according to a beta distribution. Slows down the solver significantly.<nearbySelection> <betaDistributionAlpha>1</betaDistributionAlpha> <betaDistributionBeta>5</betaDistributionBeta> </nearbySelection>
2.2. Multi-threaded solving
|
This feature is a commercial feature of Timefold Solver Enterprise Edition. It is not available in the Community Edition. |
There are several ways of doing multi-threaded solving:
-
Multi-threaded incremental solving: Solve 1 dataset with multiple threads without sacrificing incremental score calculation.
-
Donate a portion of your CPU cores to Timefold Solver to scale up the score calculation speed and get the same results in fraction of the time.
-
-
Partitioned Search: Split 1 dataset in multiple parts and solve them independently.
-
Multi bet solving: solve 1 dataset with multiple, isolated solvers and take the best result.
-
Not recommended: This is a marginal gain for a high cost of hardware resources.
-
Use the Benchmarker during development to determine the algorithm that is the most appropriate on average.
-
-
Multitenancy: solve different datasets in parallel.
-
The
SolverManagercan help with that.
-
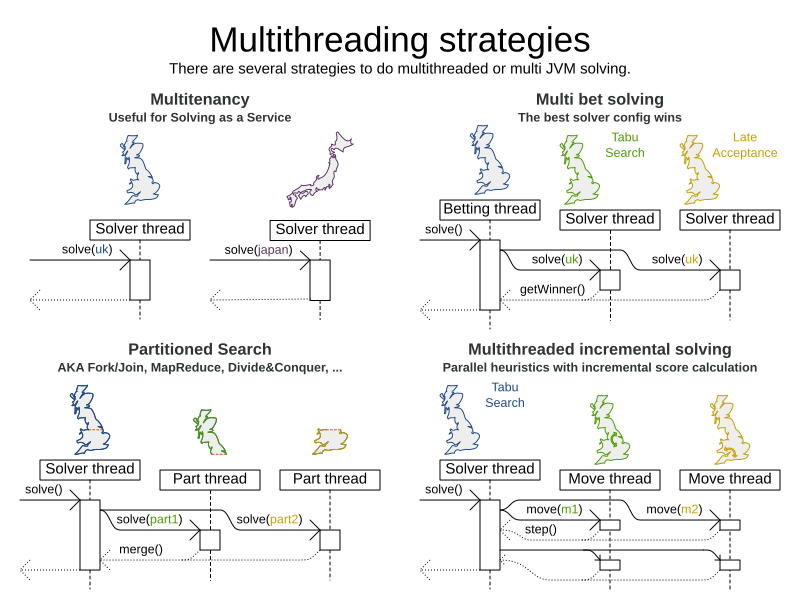
In this section, we will focus on multi-threaded incremental solving and partitioned search.
|
A logging level of |
2.2.1. Multi-threaded incremental solving
With this feature, the solver can run significantly faster, getting you the right solution earlier. It is especially useful for large datasets, where score calculation speed is the bottleneck.
The following table shows the observed score calculation speeds of the Vehicle Routing Problem and the Maintenance Scheduling Problem, as the number of threads increases:
| Number of Threads | Vehicle Routing | Maintenance Scheduling |
|---|---|---|
1 |
~ 22,000 |
~ 6,000 |
2 |
~ 40,000 |
~ 11,000 |
4 |
~ 70,000 |
~ 19,000 |
As we can see, the speed increases with the number of threads, but the scaling is not exactly linear due to the overhead of managing communication between multiple threads. Above 4 move threads, this overhead tends to dominate and therefore we do not recommend scaling over that threshold.
|
These numbers are strongly dependent on move selector configuration, size of the dataset and performance of individual constraints. We believe they are indicative of the speedups you can expect from this feature, but your mileage may vary significantly. |
Enabling multi-threaded incremental solving
Enable multi-threaded incremental solving
by adding a @PlanningId annotation
on every planning entity class and planning value class.
Then configure a moveThreadCount:
-
Quarkus
-
Spring
-
Java
-
XML
Add the following to your application.properties:
quarkus.timefold.solver.move-thread-count=AUTOAdd the following to your application.properties:
timefold.solver.move-thread-count=AUTOUse the `SolverConfig` class:SolverConfig solverConfig = new SolverConfig()
...
.withMoveThreadCount("AUTO");
Add the following to your solverConfig.xml:
<solver xmlns="https://timefold.ai/xsd/solver" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:schemaLocation="https://timefold.ai/xsd/solver https://timefold.ai/xsd/solver/solver.xsd">
...
<moveThreadCount>AUTO</moveThreadCount>
...
</solver>Setting moveThreadCount to AUTO allows Timefold Solver to decide how many move threads to run in parallel.
This formula is based on experience and does not hog all CPU cores on a multi-core machine.
A moveThreadCount of 4 saturates almost 5 CPU cores.
the 4 move threads fill up 4 CPU cores completely
and the solver thread uses most of another CPU core.
The following moveThreadCounts are supported:
-
NONE(default): Don’t run any move threads. Use the single threaded code. -
AUTO: Let Timefold Solver decide how many move threads to run in parallel. On machines or containers with little or no CPUs, this falls back to the single threaded code. -
Static number: The number of move threads to run in parallel. This can be
1to enforce running the multi-threaded code with only 1 move thread (which is less efficient thanNONE).
|
In cloud environments where resource use is billed by the hour, consider the trade-off between cost of the extra CPU cores needed and the time saved. Compute nodes with higher CPU core counts are typically more expensive to run and therefore you may end up paying more for the same result, even though the actual compute time needed will be less. |
It is counter-effective to set a moveThreadCount
that is higher than the number of available CPU cores,
as that will slow down the score calculation speed.
One good reason to do it anyway, is to reproduce a bug of a high-end production machine.
|
Multi-threaded solving is still reproducible, as long as the resolved |
Advanced configuration
There are additional parameters you can supply to your solverConfig.xml:
<solver xmlns="https://timefold.ai/xsd/solver" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:schemaLocation="https://timefold.ai/xsd/solver https://timefold.ai/xsd/solver/solver.xsd">
<moveThreadCount>4</moveThreadCount>
<moveThreadBufferSize>10</moveThreadBufferSize>
<threadFactoryClass>...MyAppServerThreadFactory</threadFactoryClass>
...
</solver>The moveThreadBufferSize power tweaks the number of moves that are selected but won’t be foraged.
Setting it too low reduces performance, but setting it too high too.
Unless you’re deeply familiar with the inner workings of multi-threaded solving, don’t configure this parameter.
To run in an environment that doesn’t like arbitrary thread creation,
use threadFactoryClass to plug in a custom thread factory.
2.2.2. Partitioned search
|
This feature is a commercial feature of Timefold Solver Enterprise Edition. It is not available in the Community Edition. |
Algorithm description
It is often more efficient to partition large data sets (usually above 5000 planning entities) into smaller pieces and solve them separately. Partition Search is multi-threaded, so it provides a performance boost on multi-core machines due to higher CPU utilization. Additionally, even when only using one CPU, it finds an initial solution faster, because the search space sum of a partitioned Construction Heuristic is far less than its non-partitioned variant.
However, partitioning does lead to suboptimal results, even if the pieces are solved optimally, as shown below:

It effectively trades a short term gain in solution quality for long term loss. One way to compensate for this loss, is to run a non-partitioned Local Search after the Partitioned Search phase.
|
Not all use cases can be partitioned. Partitioning only works for use cases where the planning entities and value ranges can be split into n partitions, without any of the constraints crossing boundaries between partitions. |
Configuration
Simplest configuration:
<partitionedSearch>
<solutionPartitionerClass>...MyPartitioner</solutionPartitionerClass>
</partitionedSearch>Also add a @PlanningId annotation
on every planning entity class and planning value class.
There are several ways to partition a solution.
Advanced configuration:
<partitionedSearch>
...
<solutionPartitionerClass>...MyPartitioner</solutionPartitionerClass>
<runnablePartThreadLimit>4</runnablePartThreadLimit>
<constructionHeuristic>...</constructionHeuristic>
<localSearch>...</localSearch>
</partitionedSearch>The runnablePartThreadLimit allows limiting CPU usage to avoid hanging your machine, see below.
To run in an environment that doesn’t like arbitrary thread creation, plug in a custom thread factory.
|
A logging level of |
Just like a <solver> element, the <partitionedSearch> element can contain one or more phases.
Each of those phases will be run on each partition.
A common configuration is to first run a Partitioned Search phase (which includes a Construction Heuristic and a Local Search) followed by a non-partitioned Local Search phase:
<partitionedSearch>
<solutionPartitionerClass>...MyPartitioner</solutionPartitionerClass>
<constructionHeuristic/>
<localSearch>
<termination>
<secondsSpentLimit>60</secondsSpentLimit>
</termination>
</localSearch>
</partitionedSearch>
<localSearch/>Partitioning a solution
Custom SolutionPartitioner
To use a custom SolutionPartitioner, configure one on the Partitioned Search phase:
<partitionedSearch>
<solutionPartitionerClass>...MyPartitioner</solutionPartitionerClass>
</partitionedSearch>Implement the SolutionPartitioner interface:
public interface SolutionPartitioner<Solution_> {
List<Solution_> splitWorkingSolution(ScoreDirector<Solution_> scoreDirector, Integer runnablePartThreadLimit);
}The size() of the returned List is the partCount (the number of partitions).
This can be decided dynamically, for example, based on the size of the non-partitioned solution.
The partCount is unrelated to the runnablePartThreadLimit.
To configure values of a SolutionPartitioner dynamically in the solver configuration
(so the Benchmarker can tweak those parameters),
add the solutionPartitionerCustomProperties element and use custom properties:
<partitionedSearch>
<solutionPartitionerClass>...MyPartitioner</solutionPartitionerClass>
<solutionPartitionerCustomProperties>
<property name="myPartCount" value="8"/>
<property name="myMinimumProcessListSize" value="100"/>
</solutionPartitionerCustomProperties>
</partitionedSearch>Runnable part thread limit
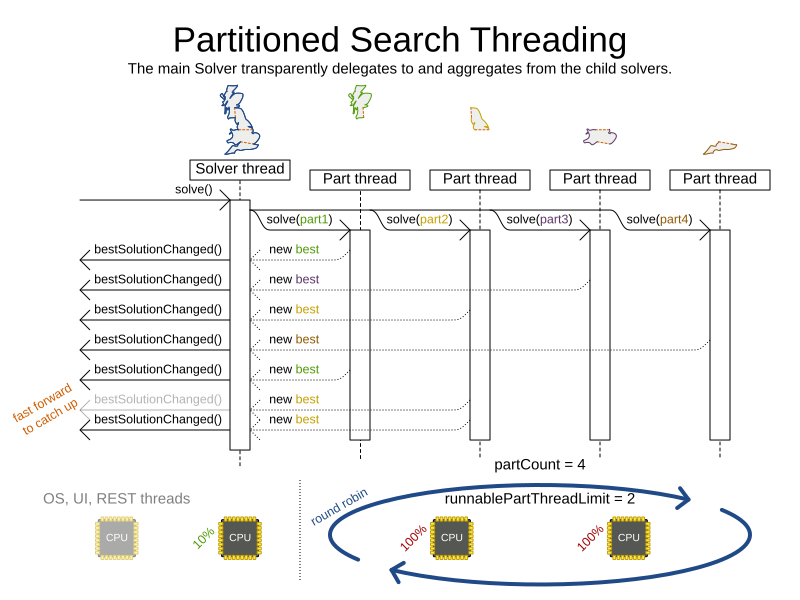
When running a multi-threaded solver, such as Partitioned Search, CPU power can quickly become a scarce resource, which can cause other processes or threads to hang or freeze. However, Timefold Solver has a system to prevent CPU starving of other processes (such as an SSH connection in production or your IDE in development) or other threads (such as the servlet threads that handle REST requests).
As explained in sizing hardware and software,
each solver (including each child solver) does no IO during solve() and therefore saturates one CPU core completely.
In Partitioned Search, every partition always has its own thread, called a part thread.
It is impossible for two partitions to share a thread,
because of asynchronous termination:
the second thread would never run.
Every part thread will try to consume one CPU core entirely, so if there are more partitions than CPU cores,
this will probably hang the system.
Thread.setPriority() is often too weak to solve this hogging problem, so another approach is used.
The runnablePartThreadLimit parameter specifies how many part threads are runnable at the same time.
The other part threads will temporarily block and therefore will not consume any CPU power.
This parameter basically specifies how many CPU cores are donated to Timefold Solver.
All part threads share the CPU cores in a round-robin manner
to consume (more or less) the same number of CPU cycles:
The following runnablePartThreadLimit options are supported:
-
UNLIMITED: Allow Timefold Solver to occupy all CPU cores, do not avoid hogging. Useful if a no hogging CPU policy is configured on the OS level. -
AUTO(default): Let Timefold Solver decide how many CPU cores to occupy. This formula is based on experience. It does not hog all CPU cores on a multi-core machine. -
Static number: The number of CPU cores to consume. For example:
<runnablePartThreadLimit>2</runnablePartThreadLimit>
|
If the |
2.2.3. Custom thread factory (WildFly, GAE, …)
The threadFactoryClass allows to plug in a custom ThreadFactory for environments
where arbitrary thread creation should be avoided,
such as most application servers (including WildFly) or Google App Engine.
Configure the ThreadFactory on the solver to create the move threads
and the Partition Search threads with it:
<solver xmlns="https://timefold.ai/xsd/solver" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:schemaLocation="https://timefold.ai/xsd/solver https://timefold.ai/xsd/solver/solver.xsd">
<threadFactoryClass>...MyAppServerThreadFactory</threadFactoryClass>
...
</solver>2.3. Automatic node sharing
|
This feature is a commercial feature of Timefold Solver Enterprise Edition. It is not available in the Community Edition. |
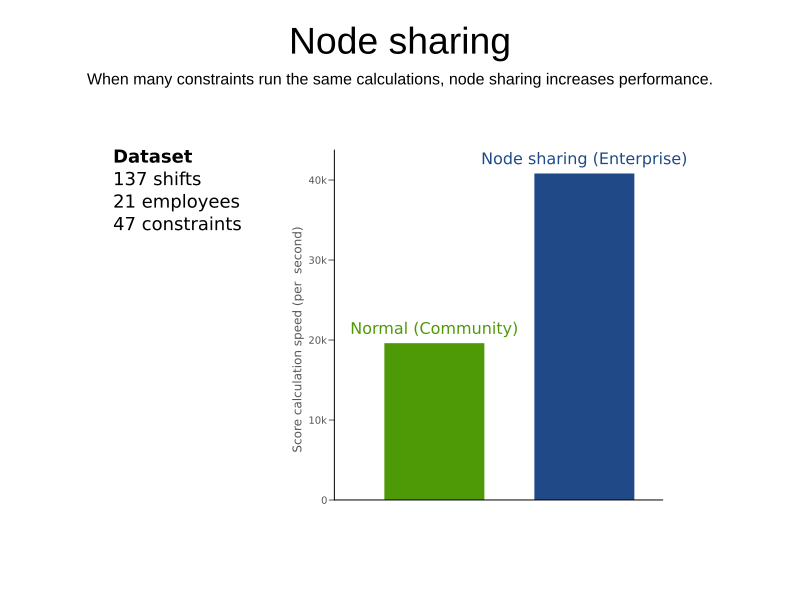
When a ConstraintProvider does an operation for multiple constraints (such as finding all shifts corresponding to an employee), that work can be shared.
This can significantly improve score calculation speed if the repeated operation is computationally expensive:
2.3.1. Configuration
-
Plain Java
-
Spring Boot
-
Quarkus
-
Add
<constraintStreamAutomaticNodeSharing>true</constraintStreamAutomaticNodeSharing>in yoursolverConfig.xml:
<!-- ... -->
<scoreDirectorFactory>
<constraintProviderClass>org.acme.MyConstraintProvider</constraintProviderClass>
<constraintStreamAutomaticNodeSharing>true</constraintStreamAutomaticNodeSharing>
</scoreDirectorFactory>
<!-- ... -->Set the property timefold.solver.constraint-stream-automatic-node-sharing to true in application.properties:
timefold.solver.constraint-stream-automatic-node-sharing=trueSet the property quarkus.timefold.solver.constraint-stream-automatic-node-sharing to true in application.properties:
quarkus.timefold.solver.constraint-stream-automatic-node-sharing=true|
To use automatic node sharing outside Quarkus, your
Debugging breakpoints put inside your constraints will not be respected, because the |
2.3.2. What is node sharing?
When using constraint streams, each building block forms a node in the score calculation network. When two building blocks are functionally equivalent, they can share the same node in the network. Sharing nodes allows the operation to be performed only once instead of multiple times, improving the performance of the solver. To be functionally equivalent, the following must be true:
-
The building blocks must represent the same operation.
-
The building blocks must have functionally equivalent parent building blocks.
-
The building blocks must have functionally equivalent inputs.
For example, the building blocks below are functionally equivalent:
Predicate<Shift> predicate = shift -> shift.getEmployee().getName().equals("Ann");
var a = factory.forEach(Shift.class)
.filter(predicate);
var b = factory.forEach(Shift.class)
.filter(predicate);Whereas these building blocks are not functionally equivalent:
Predicate<Shift> predicate1 = shift -> shift.getEmployee().getName().equals("Ann");
Predicate<Shift> predicate2 = shift -> shift.getEmployee().getName().equals("Bob");
// Different parents
var a = factory.forEach(Shift.class)
.filter(predicate2);
var b = factory.forEach(Shift.class)
.filter(predicate1)
.filter(predicate2);
// Different operations
var a = factory.forEach(Shift.class)
.ifExists(Employee.class);
var b = factory.forEach(Shift.class)
.ifNotExists(Employee.class);
// Different inputs
var a = factory.forEach(Shift.class)
.filter(predicate1);
var b = factory.forEach(Shift.class)
.filter(predicate2);Counterintuitively, the building blocks produced by these (seemly) identical methods are not necessarily functionally equivalent:
UniConstraintStream<Shift> a(ConstraintFactory constraintFactory) {
return factory.forEach(Shift.class)
.filter(shift -> shift.getEmployee().getName().equals("Ann"));
}
UniConstraintStream<Shift> b(ConstraintFactory constraintFactory) {
return factory.forEach(Shift.class)
.filter(shift -> shift.getEmployee().getName().equals("Ann"));
}The Java Virtual Machine is free to (and often does) create different instances of functionally equivalent lambdas. This severely limits the effectiveness of node sharing, since the only way to know two lambdas are equal is to compare their references.
When automatic node sharing is used, the ConstraintProvider class is transformed so all lambdas are accessed via a static final field.
Consider the following input class:
public class MyConstraintProvider implements ConstraintProvider {
public Constraint[] defineConstraints(ConstraintFactory constraintFactory) {
return new Constraint[] {
a(constraintFactory),
b(constraintFactory)
};
}
Constraint a(ConstraintFactory constraintFactory) {
return factory.forEach(Shift.class)
.filter(shift -> shift.getEmployee().getName().equals("Ann"))
.penalize(SimpleScore.ONE)
.asConstraint("a");
}
Constraint b(ConstraintFactory constraintFactory) {
return factory.forEach(Shift.class)
.filter(shift -> shift.getEmployee().getName().equals("Ann"))
.penalize(SimpleScore.ONE)
.asConstraint("b");
}
}When automatic node sharing is enabled, the class will be transformed to look like this:
public class MyConstraintProvider implements ConstraintProvider {
private static final Predicate<Shift> $predicate1 = shift -> shift.getEmployee().getName().equals("Ann");
public Constraint[] defineConstraints(ConstraintFactory constraintFactory) {
return new Constraint[] {
a(constraintFactory),
b(constraintFactory)
};
}
Constraint a(ConstraintFactory constraintFactory) {
return factory.forEach(Shift.class)
.filter($predicate1)
.penalize(SimpleScore.ONE)
.asConstraint("a");
}
Constraint b(ConstraintFactory constraintFactory) {
return factory.forEach(Shift.class)
.filter($predicate1)
.penalize(SimpleScore.ONE)
.asConstraint("b");
}
}This transformation means that debugging breakpoints placed inside the original ConstraintProvider will not be honored in the transformed ConstraintProvider.
From the above, you can see how this feature allows building blocks to share functionally equivalent parents, without needing the ConstraintProvider to be written in an awkward way.
2.4. Throttling best solution events in SolverManager
This feature helps you avoid overloading your system with best solution events, especially in the early phase of the solving process when the solver is typically improving the solution very rapidly.
To enable event throttling, use ThrottlingBestSolutionConsumer when starting a new SolverJob using SolverManager:
...
import ai.timefold.solver.enterprise.core.api.ThrottlingBestSolutionConsumer;
import java.time.Duration;
...
public class TimetableService {
private SolverManager<Timetable, Long> solverManager;
public String solve(Timetable problem) {
Consumer<Timetable> bestSolutionConsumer = ThrottlingBestSolutionConsumer.of(
solution -> {
// Your custom event handling code goes here.
},
Duration.ofSeconds(1)); // Throttle to 1 event per second.
String jobId = ...;
solverManager.solveBuilder()
.withProblemId(jobId)
.withProblem(problem)
.withBestSolutionConsumer(bestSolutionConsumer)
.run(); // Start the solver job and listen to best solutions, with throttling.
return jobId;
}
}This will ensure that your system will never receive more than one best solution event per second. Some other important points to note:
-
If multiple events arrive during the pre-defined 1-second interval, only the last event will be delivered.
-
When the
SolverJobterminates, the last event received will be delivered regardless of the throttle, unless it was already delivered before. -
If your consumer throws an exception, we will still count the event as delivered.
-
If the system is too occupied to start and execute new threads, event delivery will be delayed until a thread can be started.