Migrate from score DRL to Constraint Streams
Some of the users coming to Timefold from OptaPlanner might still be using score DRL to define their constraints. Since score DRL is the only thing we have not brought with us when we forked OptaPlanner, it is time to explain how to migrate from score DRL to Constraint Streams.
Constraint Streams (CS) is a modern full-featured API for writing Timefold Solver constraints, offering several benefits over score DRL:
- Developers do not need to learn any new language. CS is plain Java (or Kotlin).
- CS provides full IDE support including syntax highlighting and refactoring.
- CS provides comprehensive support for unit testing.
- In most use cases, CS performs considerably faster than score DRL.
Limits of this guide
CS and DRL are very similar in their approach to processing your data model. Because of this, migrating many parts of score DRL to CS is straight-forward, even mechanical. However, this guide does not help you if your score DRL uses the following constructs, because there is no direct mapping between DRL and CS in these cases:
- The DRL
insertLogical()attribute allows information to be transferred between rules. This is not possible in CS, where each constraint is isolated and stands on its own. One typical use case forinsertLogical()was detecting sequences of consecutive shifts in the Nurse Rostering example. This particular use case can be handled by using the consecutive constraint collector. - The DRL right-hand side allows for arbitrary Java code execution that goes far beyond calculating the match weight. This is not possible in CS, where each constraint can only result in either a score reward or a penalty.
If you are using either of these constructs, we recommend that you first refactor them out of your DRL and then check back with this migration guide.
With that out of the way, let’s get the migration started.
Create and configure a ConstraintProvider class
In score DRL, all your constraints are typically written in a single text file, for example:
package org.optaplanner.examples.vehiclerouting.optional.score;
dialect "java"
import ...;
global HardSoftLongScoreHolder scoreHolder;
rule "vehicleCapacity"
when
...
then
...
end
...
In this file, each rule represents one or more constraints. In CS, the DRL file is replaced by standard Java source code:
package ai.timefold.solver.examples.vehiclerouting.score;
import ...;
public class VehicleRoutingConstraintProvider implements ConstraintProvider {
@Override
public Constraint[] defineConstraints(ConstraintFactory factory) {
return new Constraint[] {
vehicleCapacity(factory),
...
};
}
protected Constraint vehicleCapacity(ConstraintFactory factory) {
...
}
...
}
The method defineConstraints(…), a single method on the ConstraintProvider, lists all your constraints. Each constraint is then typically represented by a method.
Solver configuration
Quarkus and Spring users most likely do not need to worry about solver configuration. Just remove the score DRL and create a ConstraintProvider implementation.
In OptaPlanner’s solver configuration XML however, score DRL is configured by pointing the solver to the DRL file:
<solver>
...
<scoreDirectorFactory>
<scoreDrl>org/optaplanner/examples/vehiclerouting/optional/score/vehicleRoutingConstraints.drl</scoreDrl>
</scoreDirectorFactory>
...
</solver>
Constraint Streams are selected by pointing the solver to an implementation of the ConstraintProvider interface from above:
<solver>
...
<scoreDirectorFactory>
<constraintProviderClass>ai.timefold.solver.examples.vehiclerouting.score.VehicleRoutingConstraintProvider</constraintProviderClass>
</scoreDirectorFactory>
...
</solver>
Migrating trivial constraints
Many constraints follow a simple pattern of picking an entity and immediately penalizing it. Let’s look at an example from the field of vehicle routing:
rule "distanceToPreviousStandstill"
when
Customer(previousStandstill != null, $distanceFromPreviousStandstill : distanceFromPreviousStandstill)
then
scoreHolder.addSoftConstraintMatch(kcontext, - $distanceFromPreviousStandstill);
end
Here, each initialized Customer instance incurs a soft penalty equivalent to the value of its distanceFromPreviousStandstill field. Here’s how the same result is achieved in CS:
Constraint distanceToPreviousStandstill(ConstraintFactory factory) {
return factory.forEach(Customer.class)
.penalizeLong(HardSoftLongScore.ONE_SOFT, Customer::getDistanceFromPreviousStandstill)
.asConstraint("distanceToPreviousStandstill");
}
Note that:
forEach(Customer.class)serves the same purpose asCustomer(…)in DRL.- There is no need to check if a planning variable is initialized (
previousStandstill != null), becauseforEach(…)does it automatically. If this behavior is not what you want, useforEachIncludingNullVars(…)instead. - The right-hand side of the rule (the part after
then) is replaced by a call topenalizeLong(…). The size of the penalty is now determined by the constraint weight (HardSoftLongScore.ONE_SOFT) and match weight (the call to a getter onCustomer).
The match weight is a key difference between DRL and CS. In DRL, each rule adds a constraint match together with a total penalty. In CS, each constraint applies a reward or a penalty based on several factors:
- A penalty or reward. A penalty has a negative impact on the score, while a reward impacts the score positively.
- A constant constraint weight, such as
HardSoftScore.ONE_SOFT,HardMediumSoftScore.ONE_HARD. Constraint weights can be either fixed or configurable. - A dynamic match weight. This applies to any individual match and is typically specified by a lambda (for example
customer -> customer.getDistanceFromPreviousStandstill()). If not specified, it defaults to1.
The impact of each constraint match is calculated using the following formula:
(isReward ? 1 : -1) * (constraint weight) * (match weight)
Applying rewards instead of penalties
In the example above, score DRL applies a penalty by adding a negative constraint match, for example:
scoreHolder.addSoftConstraintMatch(kcontext, - $distanceFromPreviousStandstill).
CS makes this more explicit by using the keyword penalize instead of add…, while keeping the match weight positive:
penalizeLong(…, …, customer -> customer.getDistanceFromPreviousStandstill()).
You can accomplish a positive impact without changing the match weight if you replace penalize by reward :
rewardLong(…, …, customer -> customer.getDistanceFromPreviousStandstill()).
Applying different penalty types
In the example above, distanceFromPreviousStandstill is of the type long and therefore the DRL scoreHolder.addSoftConstraintMatch(kcontext, - $distanceFromPreviousStandstill) maps to the CS penalizeLong(…, …, customer -> customer.getDistanceFromPreviousStandstill()).
If the type was int, it would map to penalize(…) instead. Similarly, if the type was BigDecimal, it would map to penalizeBigDecimal(…). No types other than int, long, and BigDecimal are supported.
The same applies to rewards.
Applying configurable constraint weights
In some cases, such as in the Conference Scheduling example, constraint weights are specified in a @ConstraintConfiguration annotated class and not in the score DRL. The relevant right-hand side of the score DRL would look like this:
scoreHolder.penalize(kcontext, $penalty);
In CS, this situation maps to penalizeConfigurable(…) and similarly for rewards.
For more information, see penalties and rewards in Timefold Solver Documentation.
Migrating constraints with filters
In the vehicle routing field, we could also find the following rule:rule "distanceFromLastCustomerToDepot"
when
$customer : Customer(previousStandstill != null, nextCustomer == null)
then
Vehicle vehicle = $customer.getVehicle();
scoreHolder.addSoftConstraintMatch(kcontext, - $customer.getDistanceTo(vehicle));
end
There are many similarities to the previous rule, but this time we penalize Customer only when the nextCustomer field is null. To do the same in CS, we introduce a filter(…)call where we check the return value of a getter for null.
Constraint distanceFromLastCustomerToDepot(ConstraintFactory factory) {
return factory.forEach(Customer.class)
.filter(customer -> customer.getNextCustomer() == null)
.penalizeLong(HardSoftLongScore.ONE_SOFT,
customer -> {
Vehicle vehicle = customer.getVehicle();
return customer.getDistanceTo(vehicle);
})
.asConstraint("distanceFromLastCustomerToDepot");
}
For more information, see filtering section in Timefold Solver Documentation.
Migrating eval(…)
The eval(…) construct allows us to execute an arbitrary piece of code that returns boolean. As such, it is functionally equivalent to the CS filter(…) construct as described previously. However, we discourage the use of eval(…) because executing custom code, such as calling external services or processing collections iteratively, is likely to slow your constraints down.
Migrating constraints with joins
Some constraints penalize based on a combination of entities or facts, such as in the NQueens example:
rule "Horizontal conflict"
when
Queen($id : id, row != null, $i : rowIndex)
Queen(id > $id, rowIndex == $i)
then
scoreHolder.addConstraintMatch(kcontext, -1);
end
Here, we select a pair of different queens (second Queen.id greater than first Queen.id) which share the same row (second Queen.rowIndex equal to first Queen.rowIndex). Each pair is then penalized by 1.
Here’s how to do the same thing in CS, using a join(…) call with some Joiners:
Constraint horizontalConflict(ConstraintFactory factory) {
return factory.forEach(Queen.class)
.join(Queen.class,
Joiners.greaterThan(Queen::getId),
Joiners.equal(Queen::getRowIndex))
.penalize(SimpleScore.ONE)
.asConstraint("Horizontal conflict");
}
The Joiners.greaterThan(Queen::getId) statement is a way of expressing the DRL queen.id > $id statement in Java. Similarly, Joiners.equal(Queen::getRowIndex)represents the DRL queen.rowIndex == $i statement.
However, in this case, we can go further and use some CS syntactic sugar:
Constraint horizontalConflict(ConstraintFactory factory) {
return factory.forEachUniquePair(Queen.class,
equal(Queen::getRowIndex))
.penalize(SimpleScore.ONE)
.asConstraint("Horizontal conflict");
}
Using forEachUniquePair(Queen.class), the greaterThan(…) joiner is inserted automatically, and we only need to match the row indexes.
For more information, see joining in Timefold Solver Documentation.
Applying filters while joining
In certain cases, you might need to apply a filter while joining, such as in the case of the Conference Scheduling example:
rule "Talk prerequisite talks"
when
$talk1 : Talk(timeslot != null)
$talk2 : Talk(timeslot != null,
!getTimeslot().startsAfter($talk1.getTimeslot()),
getPrerequisiteTalkSet().contains($talk1))
then
scoreHolder.penalize(kcontext,
$talk1.getDurationInMinutes() + $talk2.getDurationInMinutes());
end
Note that the second Talk is only selected if its prerequisiteTalkSet contains the first Talk. Because there is no CS joiner for this specific operation yet, we need to use a generic filtering joiner:
Constraint talkPrerequisiteTalks(ConstraintFactory factory) {
return factory.forEach(Talk.class)
.join(Talk.class,
Joiners.greaterThan(
talk1 -> talk1.getTimeslot().getEndDateTime(),
talk2 -> talk2.getTimeslot().getStartDateTime()),
Joiners.filtering((talk1, talk2) -> talk2.getPrerequisiteTalkSet().contains(talk1)))
.penalizeConfigurable(Talk::combinedDurationInMinutes)
.asConstraint(TALK_PREREQUISITE_TALKS);
}
Migrating large joins
CS only supports up to three joins natively. If you need four or more joins, refer to mapping tuples in Timefold Solver Documentation.
Migrating exists and not
The DRL exists keyword can be converted to CS much like the join above. Consider this rule from the Cloud Balancing example:
rule "computerCost"
when
$computer : CloudComputer($cost : cost)
exists CloudProcess(computer == $computer)
then
scoreHolder.addSoftConstraintMatch(kcontext, - $cost);
end
Here, only penalize a computer if a process exists that runs on that particular computer. An equivalent constraint stream looks like this:
Constraint computerCost(ConstraintFactory constraintFactory) {
return constraintFactory.forEach(CloudComputer.class)
.ifExists(CloudProcess.class,
Joiners.equal(Function.identity(), CloudProcess::getComputer))
.penalize(HardSoftScore.ONE_SOFT, CloudComputer::getCost)
.asConstraint("computerCost");
}
Notice how the ifExists(…) call uses the Joiners class to define the relationship between CloudProcess and CloudComputer.
For the use of the DRL not keyword, consider this rule from the Traveling Sales Person (TSP) example:
rule "distanceFromLastVisitToDomicile"
when
$visit : Visit(previousStandstill != null)
not Visit(previousStandstill == $visit)
$domicile : Domicile()
then
scoreHolder.addConstraintMatch(kcontext, - $visit.getDistanceTo($domicile));
end
A visit is only penalized if it is the final visit of the journey. The same can be achieved in CS using the ifNotExists(…) building block:
Constraint distanceFromLastVisitToDomicile(ConstraintFactory constraintFactory) {
return constraintFactory.forEach(Visit.class)
.ifNotExists(Visit.class,
Joiners.equal(visit -> visit, Visit::getPreviousStandstill))
.join(Domicile.class)
.penalizeLong(SimpleLongScore.ONE, Visit::getDistanceTo)
.asConstraint("Distance from last visit to domicile");
}
For more information on ifExists() and ifNotExists(), see conditional propagationin Timefold Solver Documentation.
Migrating accumulate
CS does not have a concept that maps mechanically to the DRL accumulate keyword. However, it does have a very powerful groupBy(…) concept. To understand the differences between the two, consider the following rule taken from the Cloud Balancing example:
rule "requiredCpuPowerTotal"
when
$computer : CloudComputer($cpuPower : cpuPower)
accumulate(
CloudProcess(
computer == $computer,
$requiredCpuPower : requiredCpuPower);
$requiredCpuPowerTotal : sum($requiredCpuPower);
$requiredCpuPowerTotal > $cpuPower
)
then
scoreHolder.addHardConstraintMatch(kcontext, $cpuPower - $requiredCpuPowerTotal);
end
For each CloudComputer, it computes a sum of CPU power required by CloudProcessinstances ($requiredCpuPowerTotal : sum($requiredCpuPower)) running on that computer (CloudProcess(computer == $computer)), and only penalizes those computers where the total power required exceeds the power available ($requiredCpuPowerTotal > $cpuPower).
For comparison, let us now see how the same is accomplished in CS using groupBy(…):
Constraint requiredCpuPowerTotal(ConstraintFactory constraintFactory) {
return constraintFactory.forEach(CloudProcess.class)
.groupBy(
CloudProcess::getComputer,
ConstraintCollectors.sum(CloudProcess::getRequiredCpuPower))
.filter((computer, requiredCpuPower) -> requiredCpuPower > computer.getCpuPower())
.penalize(HardSoftScore.ONE_HARD,
(computer, requiredCpuPower) -> requiredCpuPower - computer.getCpuPower())
.asConstraint("requiredCpuPowerTotal");
}
First, we select all CloudProcess instances (forEach(CloudProcess.class)). Then we apply groupBy in two steps:
- We split the processes into buckets ("groups") by their computer (
CloudProcess::getComputer). If two or more processes have the same computer, they belong to the same group. - For each such group, we apply a
ConstraintCollectors.sum(…)to get a sum total of power required by all processes in such group.
The result of that operation is a pair ("tuple") of facts: a CloudComputer and an intrepresenting the sum total of power required by all processes running on that computer. We then take all such tuples and filter(…) out all those where the sum total is <= that computer’s available power. Finally, we penalize the positive difference between the required power and the available power, the overconsumption.
As you can see, groupBy(…) accomplishes the same result, but goes about it differently. This is why mapping DRL accumulate to CS groupBy, while always possible, is not necessarily straight-forward or mechanical.
For more information on groupBy(…), see grouping and collectors in Timefold Solver Documentation.
Conclusion
Users of Timefold Solver can no longer rely on score DRL to define their constraints. After migration to Constraint Streams, your constraints are likely to perform faster and be easier to maintain. Migrating most types of constraints to Constraint Streams is straightforward.

SLA compliance: What missing deadlines actually costs you in field service
A service call runs long, and your team misses an SLA commitment. The incident is documented, stakeholders are notified, and damage control begins. A root-cause analysis is initiated, corrective actions are identified, and the operations team assures the customer that the issue will never happen again. Soon after, the financial penalty is assessed, the fee appears on an invoice, and the incident is closed.
Most organizations stop measuring the cost there. Your customer does not. The penalty fee is the most visible consequence of an SLA miss, and it is usually the smallest. The larger costs, including customer churn, reputational damage, and risk to current and future contracts, keep affecting your business long after the original incident is resolved.
Your customer remembers the disruption the breach brought to their operation. And while your operations team focuses on preventing the next violation, your customer is evaluating whether they can continue relying on you.
The number on the invoice vs. what really matters
After an SLA violation, it is relatively easy to calculate the direct financial impact. That figure appears on an invoice and is included in management reports. In many organizations, the number becomes the primary measure of the incident's impact.
The problem is that the number on the invoice captures only the direct cost of the violation. It does not capture the broader business impact that often follows.
Paying the financial penalty may satisfy your contractual obligations. Rebuilding customer trust is another matter, and that is why customer churn begins long before a contract officially ends.
Customer churn: the quiet cost of eroded trust
Customers do not always complain after an SLA miss. More often, trust erodes gradually. In many industries, replacing a service provider is neither simple nor quick. A customer may continue the relationship while quietly evaluating alternatives or preparing to test the market at contract renewal.
That possibility of losing their business matters because customer retention has a direct effect on profitability. Replacing lost customers is significantly more expensive than retaining existing ones. As Stripe notes, customer acquisition costs often exceed retention costs by a wide margin. That makes customer churn one of the most expensive hidden consequences of an SLA miss.
How SLA history shapes renewal and rebid outcomes for current contracts
Contract renewals are rarely based on a single SLA violation. Instead, customers look for patterns across multiple incidents. Historical SLA performance provides an objective record of how consistently a provider has met its commitments, which makes it an important consideration in renewal and rebid decisions.
Strong performance builds renewal confidence
Customers prefer to avoid the time, cost, and disruption of changing service providers. A strong SLA history reduces perceived risk and reinforces confidence that a provider can continue to meet expectations. As a result, providers with consistent performance records are often in a stronger position during renewal discussions.
Repeated misses shift negotiating power
When SLA violations become a pattern, customers may use historical performance data to:
- negotiate lower pricing,
- demand stricter service requirements, or
- require additional reporting and greater oversight.
In more serious cases, repeated SLA misses increase the likelihood of a competitive rebid. A customer may issue an RFP (a request for proposal that opens the contract to competing providers) and evaluate alternatives rather than let the contract renew automatically. Even when the contract is ultimately renewed, the provider may operate from a weaker position.
SLA compliance violations damage reputation for future contracts
If you think a history of SLA slips stays with the affected customer, you would likely be mistaken. According to the Procurement Excellence Network, vendor performance evaluations may be considered during future contract awards and shared across departments and peer organizations. That means a history of missed SLAs can follow your company into future contract opportunities.
What it looks like to manage SLA risk before the miss, not after
These risks are often easier to address before an SLA violation occurs than after.
For field service organizations, many SLA risks originate long before a technician arrives on-site. Scheduling decisions, technician availability, and changing service demands can all influence whether service level commitments are met.
Identifying those risks before they become customer-facing problems can help mitigate or eliminate SLA violations, along with the business consequences that follow.
Frequently asked questions
Does paying the SLA penalty resolve the issue? Paying the penalty satisfies the contractual obligation, but it does not rebuild customer trust or reverse the disruption the customer experienced.
How does SLA history affect contract renewals? Customers look for patterns across incidents. A strong record reduces perceived risk at renewal, while repeated misses can shift negotiating power and invite a competitive rebid.
Can a single SLA miss cost you a contract? Rarely on its own. The larger risk comes from a pattern of misses that erodes trust and shows up in renewal and rebid decisions.

Same coffee, same shoes, same plan: the beauty of no surprises
Same coffee, same shoes, same plan
I am, by most reasonable definitions, a creature of habit.
Same coffee every morning. Same brand of shoes for years (and a small grieving period whenever a pair finally gives up and I have to go shopping for new ones). Same route to the office. Same seat at the dinner table. My partner finds this both endearing and, occasionally, a little bit boring.
Now, this is not because I hate change. I genuinely enjoy exploring new things. New countries, new conferences, new restaurants, new problems to model. But underneath all that exploring, there is a quiet preference humming away: I like knowing what I’m going to get.
It probably won’t surprise you that this same preference is what nudged me toward software engineering in the first place. There’s something deeply satisfying about a function. You put 2 and 3 in, you get 5 out. You run it again tomorrow on a different machine, in a different timezone, after a different coffee, and you still get 5.
Most of my career has been built on that simple promise: given the same inputs, give me the same outputs. It’s how you debug things. It’s how you trust things. It’s how you sleep at night when your code is running in production.
So when I tell people I now work at an AI company, I sometimes get a raised eyebrow. The implied question is usually:
“Wait. You? The guy who reorders the exact same dish every time? Working in AI?”
I guess that’s fair…
The thing most people now call “AI”
When most people hear “AI” in 2026, their brain jumps straight to Generative AI. ChatGPT. Image generators. Coding assistants. The kind of AI that, by design, can give you a slightly different answer every time you ask. Sometimes wildly different.
That non-determinism is actually a feature for Gen AI. If you ask for “a haiku about suffering through allergies”, you don’t want the exact same poem every time. You want variety, creativity, surprise.
But not everything runs on poems. A lot of the world runs on plans. Plans for delivery routes. Plans for shift rosters. Plans for which truck picks up which order at which time. And for those, “a slightly different answer every time” is not charming. It’s a nightmare.
Being predictable isn’t boring, it’s a superpower
Here’s what I love about working at Timefold: our solver is AI, but it’s deterministic. Same data in, same CPU budget, same answer comes out.
That sentence sounds unremarkable until you’ve spent a few years debugging planning systems where it wasn’t true. Where re-running the same input gave you a different roster, a different route plan, a different recommendation… and you had no way to tell whether the difference came from the algorithm doing its job, from a bug, or from cosmic radiation (this is not sci-fi… it happens and is one of the main reasons why building data centers in space is hard).
Determinism unlocks a bunch of things that are otherwise really hard:
- You can reproduce bugs. A planner reports a weird shift assignment? You re-run the same dataset and you get the exact same weird assignment. Now you can actually investigate it.
- You can test. Real tests, with real assertions, that don’t randomly fail every third CI run. Your tests don’t say “the solution should be roughly this.” They say “the solution is this.”
- You can A/B compare changes. Want to know if your new constraint tweak actually improved things? Run before and after on the same data. Any difference you see is caused by your change, not by the dice.
- You can build trust. Planners using the system see the same plan twice and start to believe in it. Show them a different answer each time and you’re toast, no matter how good the math is.
This isn’t a small thing. It’s the difference between a system you can operate and a system you have to babysit.
Determinism is the old next thing!
I get why determinism doesn’t make for exciting marketing copy. “Our AI gives you the same answer every time” is not going to trend on LinkedIn. It sounds almost like a downgrade in an era where people expect their AI to dazzle them with novelty.
But for planning problems, where decisions affect real shifts, real deliveries, real people, boring is exactly what you want. You want a system that behaves the same way on a Tuesday as it does on a Friday. You want a result you can defend, reproduce, and test.
In other words, you want your planning AI to be a bit of a creature of habit. Same input, same output. Same coffee, same shoes.
Honestly? It’s my favorite kind of magic. 🙂

Timefold Raises $13M as AI Drives Demand for Routing and Scheduling APIs
- Led by Alstin Capital, co-investor Kompas VC, and continued backing from Lakestar and Smartfin
- ARR grew 4x in 2025 as enterprises like NEC Software Solutions, CBRE, Lufthansa, Thales, and Subaru embedded Timefold's APIs into mission-critical scheduling solutions
- Funding will accelerate US expansion and platform product development
%201.avif)
GENT, BELGIUM - 23 June 2026 - Timefold, the developer platform for vehicle routing and shift scheduling APIs, today announced the close of a $13M Series A funding round led by Alstin Capital, with co-investor Kompas VC, and continued backing from existing investors Lakestar and Smartfin.
Timefold enables software teams in field service and workforce management to easily integrate enterprise-grade scheduling optimization into the solutions they are supporting.
The round follows a year of commercial momentum. In 2025, Timefold grew its annual recurring revenue 4x, driven by enterprises and software vendors embedding its APIs into mission-critical field service operations and scheduling workflows.
The new funding will accelerate Timefold’s US expansion and support the growing enterprise demand for easy-to-integrate scheduling optimization infrastructure.
"Schedules run the world," says Maarten Vandenbroucke, CEO of Timefold. "We are all at the mercy of a schedule, and so are the millions of frontline workers whose days depend on getting it right. As software becomes increasingly autonomous, optimization becomes foundational infrastructure. That’s why we believe Timefold is the best vehicle routing scheduler. Our platform gives software builders the ability to embed enterprise-grade decision intelligence into their applications, enabling better outcomes for businesses, workers, and customers alike."
Scheduling optimization for the AI builder era
The rise of AI agents is creating a new generation of software that can understand requests and generate schedules. But LLM-generated schedules don't always work in production because of its probabilistic nature.
Timefold offers AI-powered software powered by a deterministic algorithm to tackle large-scale scheduling challenges. It enables teams to automate decisions on which technician should visit which customer, how to respond when a technician calls in sick, or how to create a shift schedule that is fair, compliant, and fully staffed.
That decision-making is particularly essential in field service, where operations are among the hardest scheduling environments to manage. Every day, companies must coordinate thousands of jobs while balancing technician qualifications, SLAs, labor regulations, travel times, customer availability, and last-minute disruptions in real time.
Freeing the world from wasteful scheduling
Handling any constraint, any scale, and any level of operational complexity, Timefold delivers measurable results. A global real estate services company reduced drive time by up to 33%, cut distance traveled by 43%, and eliminated overtime entirely using Timefold’s Field Service Routing solution. A major US retail staffing provider reduced a scheduling process that previously took 10 weeks to just 10 minutes using Timefold’s Employee Shift Scheduling model.
Enterprise customers, including NEC Software Solutions (NECSWS), CBRE, Orange Telecom, ADP, and Lufthansa, rely on Timefold to power operational scheduling workflows where inefficiency directly impacts profitability, customer experience, and workforce productivity.
“We chose Timefold because it gave us a practical way to bring advanced planning AI into real operations without slowing down delivery,” says Kay Aston of NECSWS. “Their technology helped us move faster, create clear operational value, and strengthen how we bring optimization capabilities to our customer base.”
Scheduling as a foundational component
Timefold believes scheduling optimization will become a foundational component of software in the AI era. As software development becomes more accessible and AI-generated applications become commonplace, the company’s vision is to become the default platform for building, deploying, and operating scheduling optimization models, enabling any software team to solve complex scheduling problems at scale.
"What matters in mission-critical scheduling isn't creativity, it's correctness: a shift roster or a vehicle route has to be right, compliant, and reproducible every time. LLMs aren't built for that. What convinced us to lead Timefold's round was the team's understanding of exactly that constraint, and what they've built around it. They've taken a battle-tested open source optimization engine and wrapped it in modular products that any enterprise can deploy, without needing a team of mathematicians. That's how deep optimization technology becomes infrastructure, and we believe Timefold is best placed to own that category”, says Alexander Meyer-Scharenberg, Partner at Alstin Capital.
How upskilling technicians unlocks field service routing efficiency
In telecom, utilities, and HVAC, not every technician can handle every job. A field engineer certified for fiber installations may or may not also hold IP networking qualifications. These skill gaps seem like a workforce planning issue, but they compound into a routing problem that costs companies millions in unnecessary travel time and lost capacity.
The question worth asking: how much money are you leaving on the table? We've modeled it across multiple scenarios and quantified the answer in dollars.
The problem
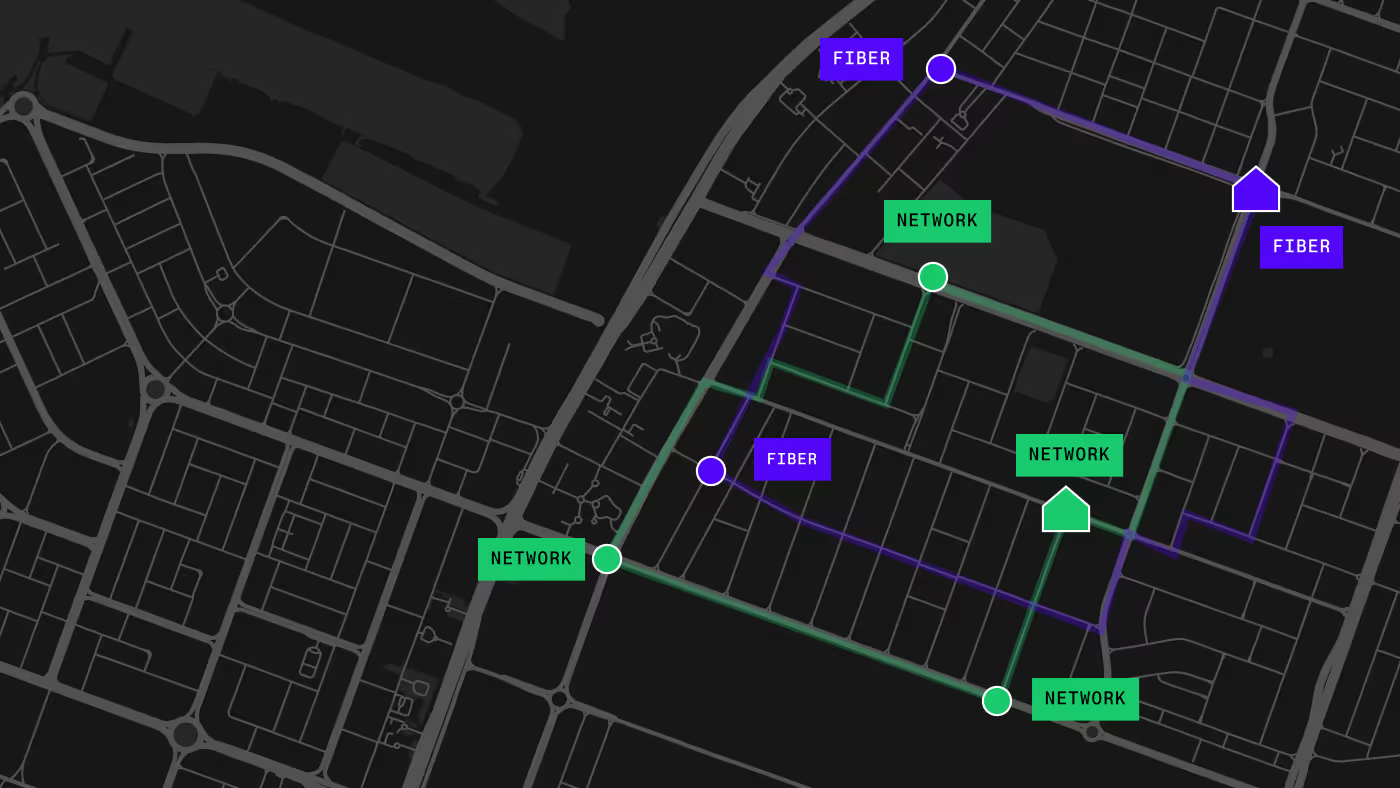
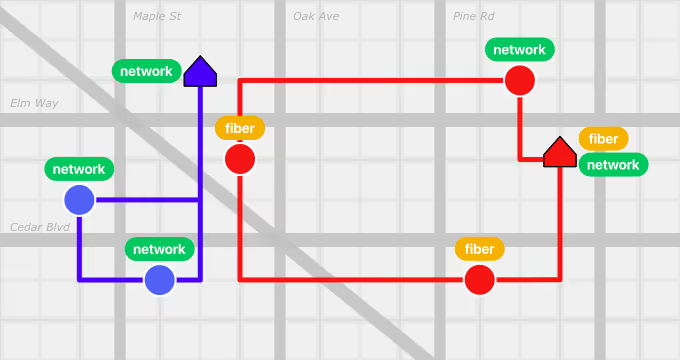
Consider a simplified but representative example: 5 service visits, 2 technicians, each visit requiring one specific skill, each technician holding one skill.
The routing algorithm has no choice but to send both technicians across the city to match skills to jobs, even when a geographically closer technician could handle the work with a single additional qualification.
The result is excessive travel time, reduced daily capacity, and lower customer face time.
The opportunity
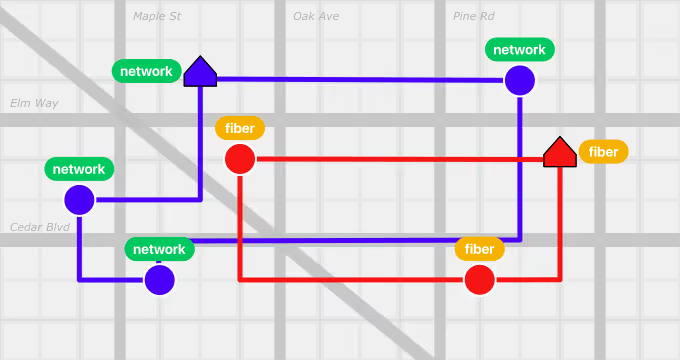
Now consider what changes when one technician is cross-trained.
With the red technician qualified for network jobs as well, the routing engine can assign jobs more efficiently, and the other technician's route contracts immediately.
Extend that to both technicians holding all relevant skills, and both routes shorten substantially.
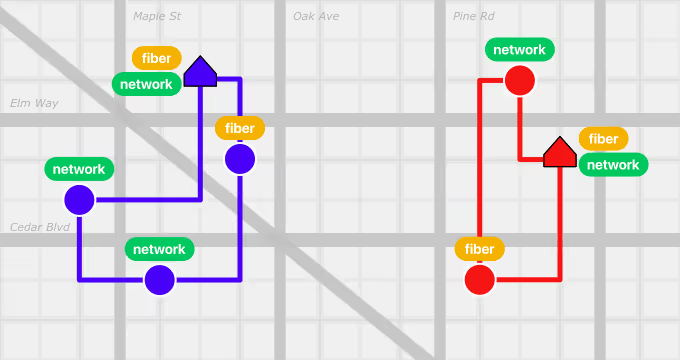
Total travel time drops significantly, freeing capacity for additional visits or higher-quality customer interactions. The productivity gain is real and measurable, not theoretical.
The benchmarks
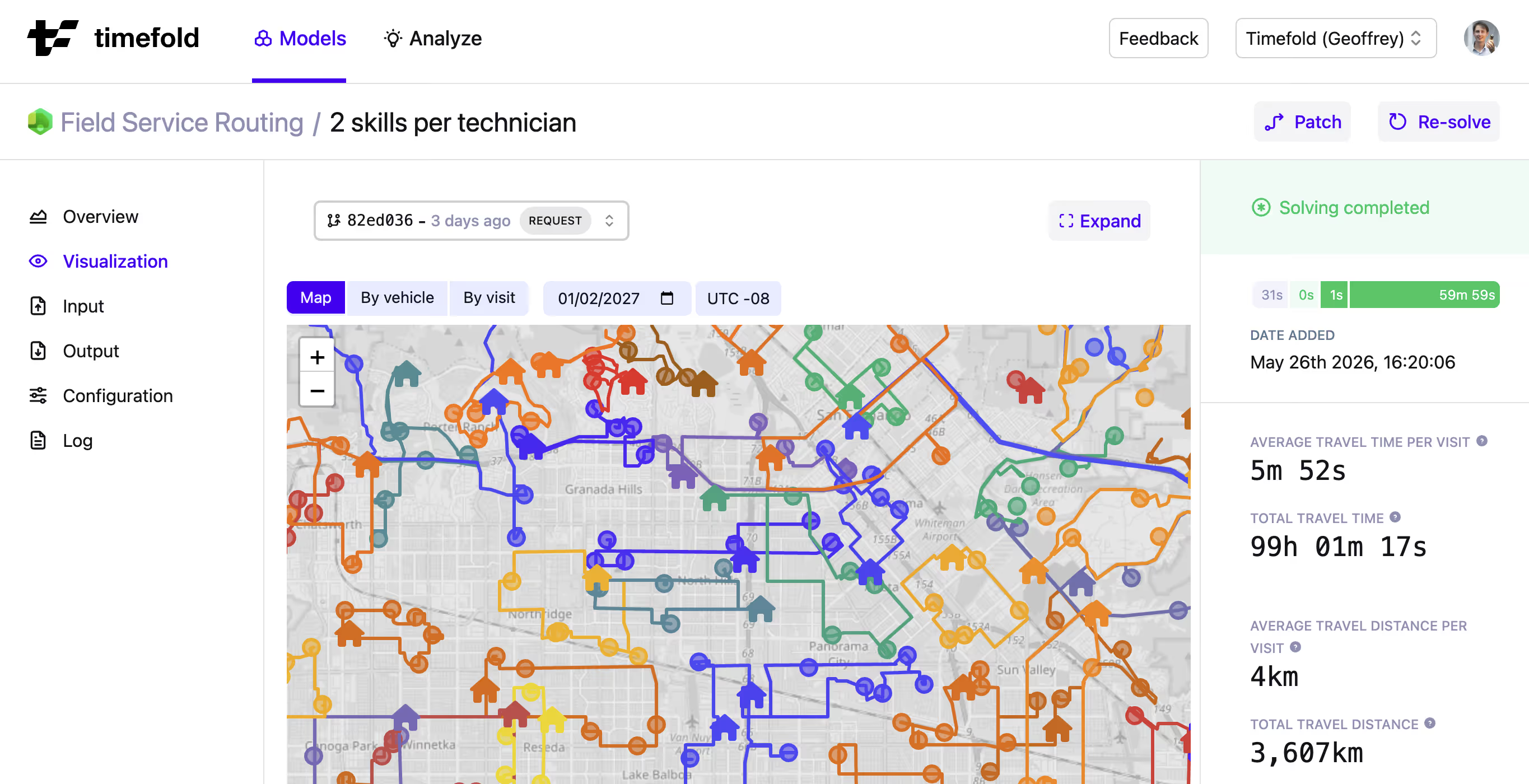
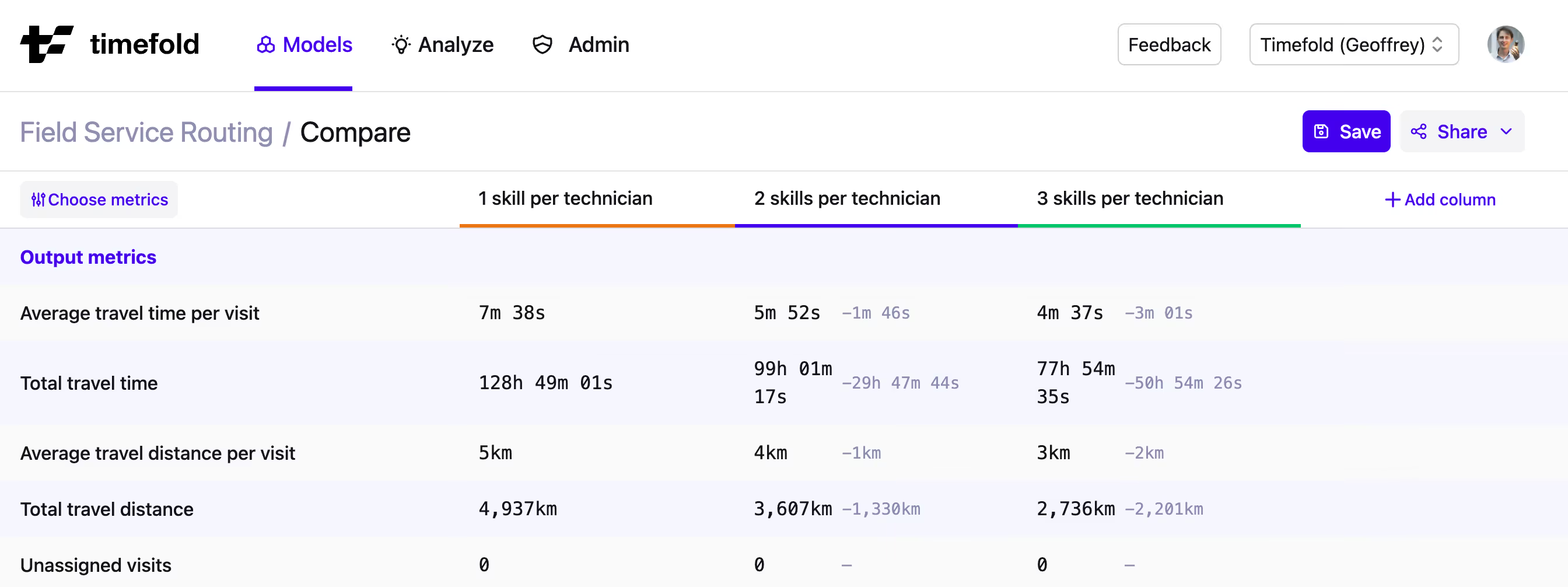
To move beyond simplified examples, we modeled this against a Los Angeles dataset with 1,012 service visits, 253 technicians, and three distinct skill types. Each job requires exactly one skill, but coverage of technician skills varies.
We ran three scenarios to simulate progressive upskilling investment:
- 1 skill per technician (baseline): No cross-training. Each technician holds exactly one qualification.
- 2 skills per technician: Every technician is trained on one additional skill.
- 3 skills per technician: Full cross-training. Every technician holds all three qualifications.
All three scenarios were solved using our Field Service Routing API.
The results
The productivity gains from upskilling are significant and consistent.
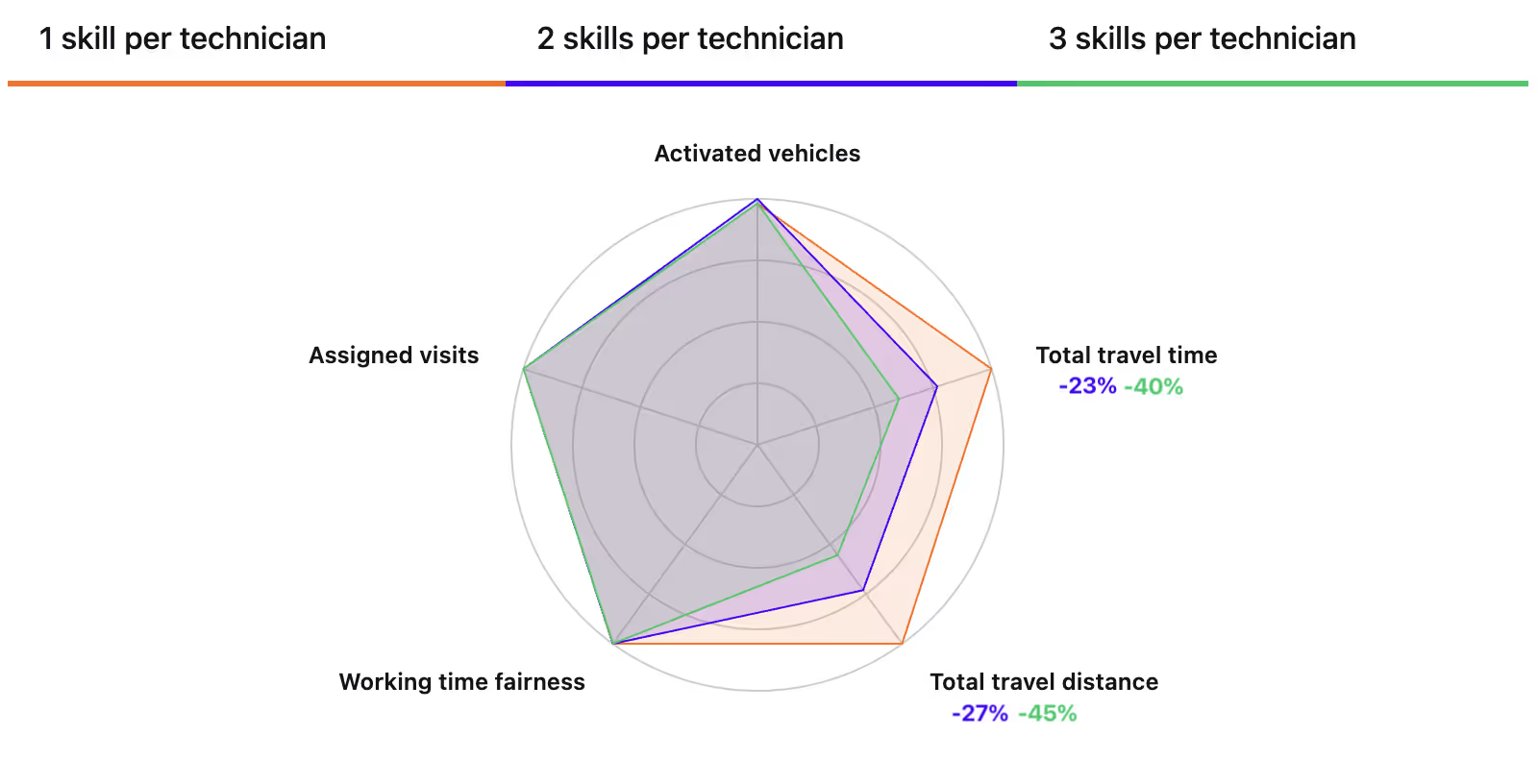
Moving from 1 to 2 skills per technician reduces travel time by 23%. For a technician averaging 2 hours of daily drive time, that's over 26 minutes saved per day, which compounds to 88 hours per year at 200 working days. At a $50/hour wage rate, that amounts to $4,400 in recovered productivity per technician annually.
Moving from 2 to 3 skills reduces travel time by a further 17%, adding another $3,400 per technician per year.
Partial upskilling
Partial upskilling still delivers meaningful ROI. Training only half the workforce on a second skill still yields a 14% reduction in travel time: $2,800 per technician per year across the organization.
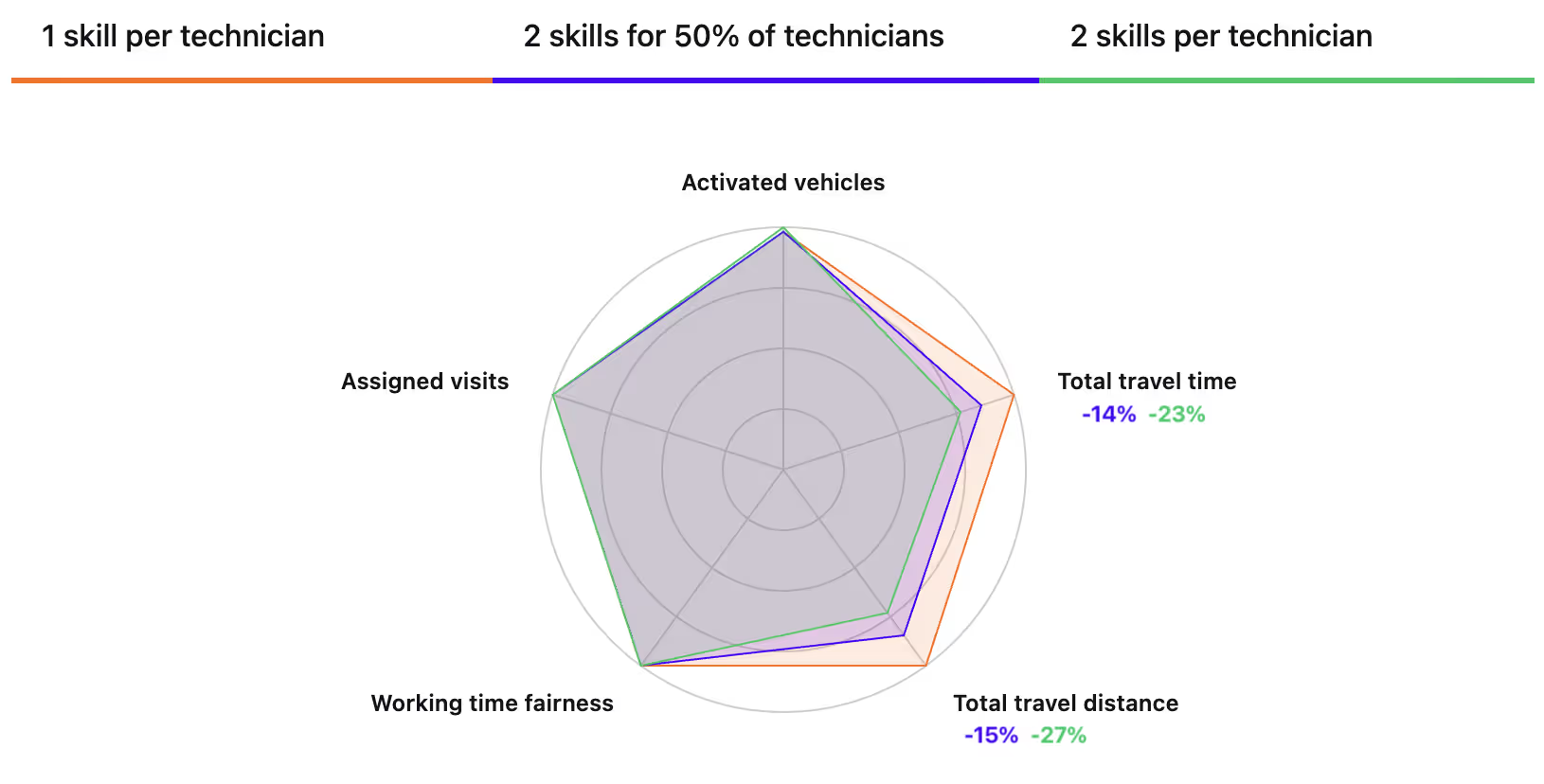
Interestingly, the ROI in this scenario reaches $5,600 per trained technician annually, as the routing engine concentrates efficiency gains through the newly cross-trained subset. The aggregate company-wide return is lower, but the per-investment return is higher; a useful lever for phased rollout decisions.
Conclusion
This analysis is based on a single dataset from a single metropolitan region. Field operations at an enterprise scale are considerably more complex, involving non-uniform skill distributions, varying geographic densities, and routing challenges across hundreds of service regions and time periods.
This study demonstrates the structure of the ROI opportunity. The specific numbers will vary with your workforce composition and operational footprint, but the finding is consistent with what we observe across our customer base.
The most accurate projections come from running these simulations against your own data. We can do exactly that and give you a defensible, operations-specific estimate of the value of upskilling investments before you make them.

How much fuel can route optimization actually save?
Fuel costs are rarely the largest expense on a field service balance sheet, but they are often the most visible indicator of operational waste. For most fleet managers, the primary challenge is not deciding whether to optimize. The real challenge is determining exactly how much margin is being lost to the road and how to capture that value in a way that satisfies a CFO.
That second part matters more than vendors usually admit. After deploying optimization, fleets often see metrics improve in some places and degrade in others. Before deciding on scheduling optimization, it is worth knowing what the typical savings range looks like, what drives the spread, and how to measure savings in a way that survives a CFO review.
What savings to expect
Across published case studies and operator interviews, field service operations moving from dispatcher-built routes to automated route optimization typically see drive time fall 15% to 30%. Fuel consumption tracks closely, with reported savings of 10% to 25% depending on territory geometry and stop density.
Two things drive the spread:
- Starting point. Fleets coming off paper routes or single-dispatcher Excel tend to land at the high end. Operations already running a basic FSM with simple capacity rules often start at 5% to 10% savings and grow from there as constraints get tuned.
- Constraint stack. A fleet with skill matching, time windows, SLAs, and overtime rules is already hard manage manually. Add multi-vehicle stops, dependent jobs, or rolling time-windows, and it becomes impossible. So, the complexer the operations, the harder it is for the human planner to zoom out, or to think about efficiency. In these cases, a feasible schedule is already a big win, but fuel costs are not something taken into account.
According to Service Council research, the cost to dispatch a technician ranges from $250 in urban environments to as high as $2,500 for rural or multi-day jobs. When you combine this with the US National average fuel price hovering at $4.50 per gallon (May 2nd, 2026),high costs are draining your service profits.
[highlight]
A useful baseline: A 200-technician operation averaging 90 miles per tech per day at 20 mpg burns roughly 900 gallons daily. At the current national average of $4.50 per gallon, that is $4,050 daily, or $1,012,500 per year (based on a 250-day work year).
- A 15% reduction in fuel usage/mileage results in $151,875 in annual savings.
- A 25% reduction results in $253,125 in annual savings.
Overtime savings often add another 30% to 50% on top because fewer hours behind the wheel means fewer late-day SLA scrambles.
[highlight]
How to measure routing optimization savings credibly
Three traps operations leaders fall into:
- Comparing optimized days against manual days that were not comparable. Manual routing tends to do better on light days and worse on heavy days. If the rollout coincides with a seasonal lull, the comparison flatters the optimizer. The fix: index by stops-per-day or jobs-per-tech, not raw miles.
- Counting gross miles, not the right miles. "Miles driven" includes deadhead, on-job movement, and home-to-first-stop legs. Optimization should mostly cut the first two. If you measure all three together, returns look smaller than they are. Pull a week of telematics data and split it before you set the baseline.
- Relying on "Holdout" territories. Comparing one territory against another is often flawed because no two regions have the same density or traffic patterns. The cleanest measurement approach is a parallel plan analysis: run your manual process as usual, but simultaneously feed the exact same job data into the optimizer. Compare the two resulting schedules for the same day to see the true delta in miles and cost.
Where different tools fit in the fuel-cost picture
The market often gets discussed as if every "route optimization" product is the same thing. They are not. Four product categories show up in fuel-reduction conversations, each doing a different job:
The right pick depends on what you already have. If you are running Salesforce Field Service and your dispatch lives there, the question is whether the bundled optimizer is hitting the savings range above. If not, you might need to call out to a scheduling API to fill the gap. If you are running a homegrown ops stack, you need a solution that provides both the distance data and the solver engine to find the best routes.
Three questions to expose if a vendor can deliver
These questions help separate vendors that can actually deliver savings from those that just quote them:
- Can your engine support all our hard constraints simultaneously? If an optimizer cannot handle every real-world rule (skills, windows, SLAs) at the same time, it will produce "invalid" routes. When a planner has to manually fix these, any theoretical fuel savings immediately vanish.
- How can the schedule adapt to real-world events? Most fuel waste happens after disruptions like sick technicians, overrun jobs, or cancellations. If the engine cannot re-solve the schedule in seconds during the day, the efficiency you gained in the morning is lost by lunch.
- How do we prove the savings during a pilot? Avoid "before and after" comparisons. Ask the vendor to perform a "shadow" run where they optimize a historical week of your real data and compare it against the actual routes your team drove.
Fuel cost is the easiest win in field service. The savings are real, the math is settled, and the technology is mature. What is left is fit: with your stack, your constraints, and how your team actually runs.

Three optimizations to make your Timefold Solver faster
Our friends at Dots & Lines recently claimed they made their Timefold Solver 17x faster and they're not wrong. With our IncrementalScoreCalculator, you can absolutely get there. But it comes bundled with months of effort, sacrificed explainability, and constraints that become a nightmare to maintain or extend.
There's a better way. In this post, we'll apply three targeted optimizations to the same course scheduling problem they used and walk away with a 91% speedup while keeping your constraints clean, testable, and easy to change.
The Setup
We're using the code from the Dots & Lines article as our baseline. If you haven't read it, don't worry, we'll cover everything you need here. One difference: we're measuring things slightly differently. We're using the comp06 dataset (where they saw the biggest gains), running for 1 minute with a 15-second JVM warmup, averaging across 10 runs in separate JVM processes, and using -Xmx1g -XX:+UseParallelGC -XX:+UseCompactObjectHeaders to fine-tune performance and keep the noise out. This gives us a more stable baseline than a single long run.
Here's the starting constraint implementation:
public class CurriculumCourseConstraintProvider implements ConstraintProvider {
@Override
public Constraint[] defineConstraints(ConstraintFactory factory) {
return new Constraint[]{
conflictingLecturesDifferentCourseInSamePeriod(factory),
conflictingLecturesSameCourseInSamePeriod(factory),
roomOccupancy(factory),
unavailablePeriodPenalty(factory),
roomCapacity(factory),
minimumWorkingDays(factory),
curriculumCompactness(factory),
roomStability(factory)
};
}
// ************************************************************************
// Hard constraints
// ************************************************************************
Constraint conflictingLecturesDifferentCourseInSamePeriod(ConstraintFactory factory) {
return factory.forEach(CourseConflict.class)
.join(Lecture.class,
equal(CourseConflict::getLeftCourse, Lecture::getCourse))
.join(Lecture.class,
equal((courseConflict, lecture1) -> courseConflict.getRightCourse(), Lecture::getCourse),
equal((courseConflict, lecture1) -> lecture1.getPeriod(), Lecture::getPeriod))
.filter(((courseConflict, lecture1, lecture2) -> lecture1 != lecture2))
.penalize(ONE_HARD,
(courseConflict, lecture1, lecture2) -> courseConflict.getConflictCount())
.asConstraint("conflictingLecturesDifferentCourseInSamePeriod");
}
Constraint conflictingLecturesSameCourseInSamePeriod(ConstraintFactory factory) {
return factory.forEachUniquePair(Lecture.class,
equal(Lecture::getPeriod),
equal(Lecture::getCourse))
.penalize(ONE_HARD,
(lecture1, lecture2) -> 1 + lecture1.getCurriculumSet().size())
.asConstraint("conflictingLecturesSameCourseInSamePeriod");
}
Constraint roomOccupancy(ConstraintFactory factory) {
return factory.forEachUniquePair(Lecture.class,
equal(Lecture::getRoom),
equal(Lecture::getPeriod))
.penalize(ONE_HARD)
.asConstraint("roomOccupancy");
}
Constraint unavailablePeriodPenalty(ConstraintFactory factory) {
return factory.forEach(UnavailablePeriodPenalty.class)
.join(Lecture.class,
equal(UnavailablePeriodPenalty::getCourse, Lecture::getCourse),
equal(UnavailablePeriodPenalty::getPeriod, Lecture::getPeriod))
.penalize(ofHard(10))
.asConstraint("unavailablePeriodPenalty");
}
// ************************************************************************
// Soft constraints
// ************************************************************************
Constraint roomCapacity(ConstraintFactory factory) {
return factory.forEach(Lecture.class)
.filter(lecture -> lecture.getStudentSize() > lecture.getRoom().getCapacity())
.penalize(ofSoft(1),
lecture -> lecture.getStudentSize() - lecture.getRoom().getCapacity())
.asConstraint("roomCapacity");
}
Constraint minimumWorkingDays(ConstraintFactory factory) {
return factory.forEach(Lecture.class)
.groupBy(Lecture::getCourse, countDistinct(Lecture::getDay))
.filter((course, dayCount) -> course.getMinWorkingDaySize() > dayCount)
.penalize(ofSoft(5),
(course, dayCount) -> course.getMinWorkingDaySize() - dayCount)
.asConstraint("minimumWorkingDays");
}
Constraint curriculumCompactness(ConstraintFactory factory) {
return factory.forEach(Curriculum.class)
.join(Lecture.class,
filtering((curriculum, lecture) -> lecture.getCurriculumSet().contains(curriculum)))
.ifNotExists(Lecture.class,
equal((curriculum, lecture) -> lecture.getDay(), Lecture::getDay),
equal((curriculum, lecture) -> lecture.getTimeslotIndex(), lecture -> lecture.getTimeslotIndex() + 1),
filtering((curriculum, lectureA, lectureB) -> lectureB.getCurriculumSet().contains(curriculum)))
.ifNotExists(Lecture.class,
equal((curriculum, lecture) -> lecture.getDay(), Lecture::getDay),
equal((curriculum, lecture) -> lecture.getTimeslotIndex(), lecture -> lecture.getTimeslotIndex() - 1),
filtering((curriculum, lectureA, lectureB) -> lectureB.getCurriculumSet().contains(curriculum)))
.penalize(ofSoft(2))
.asConstraint("curriculumCompactness");
}
Constraint roomStability(ConstraintFactory factory) {
return factory.forEach(Lecture.class)
.groupBy(Lecture::getCourse, countDistinct(Lecture::getRoom))
.filter((course, roomCount) -> roomCount > 1)
.penalize(HardSoftScore.ONE_SOFT,
(course, roomCount) -> roomCount - 1)
.asConstraint("roomStability");
}
}
With that out of the way, let's get to the optimizations!
Upgrading to the latest Timefold Solver
The original article used Timefold Solver 1.21.0, a version which is more than a year old at the time of writing this article. Since then, there have been many optimizations and bugfixes to the Timefold Solver codebase, and upgrading to the latest version of Timefold Solver is the first step to get optimal performance.
While upgrading to the newest Timefold Solver version did not significantly impact baseline performance in this use case, the newer versions do come with extra features you can implement to improve performance.
Precomputing static joins
Let's consider the conflictingLecturesDifferentCourseInSamePeriod constraint:
return factory.forEach(CourseConflict.class)
.join(Lecture.class,
equal(CourseConflict::getLeftCourse, Lecture::getCourse))
.join(Lecture.class,
equal((courseConflict, lecture1) -> courseConflict.getRightCourse(), Lecture::getCourse),
equal((courseConflict, lecture1) -> lecture1.getPeriod(), Lecture::getPeriod))
.filter(((courseConflict, lecture1, lecture2) -> lecture1 != lecture2))
.penalize(ONE_HARD,
(courseConflict, lecture1, lecture2) -> courseConflict.getConflictCount())
.asConstraint("conflictingLecturesDifferentCourseInSamePeriod");
This constraint has two joins - the first join is between CourseConflict and Lecture, and the second join is between the result of the first join and Lecture again. The first join is static. It only depends on the problem facts and does not depend on any variables. This means that the product of this join will never change during solving, and we can therefore cache it before solving, using a recently introduced precomputation feature of Timefold Solver. The adapted constraint would look like so:
return factory.precompute(
f -> f.forEachUnfiltered(Curriculum.class)
.join(Lecture.class,
filtering((curriculum, lecture) -> lecture.getCurriculumSet().contains(curriculum))))
.join(Lecture.class,
equal((courseConflict, lecture1) -> courseConflict.getRightCourse(), Lecture::getCourse),
equal((courseConflict, lecture1) -> lecture1.getPeriod(), Lecture::getPeriod))
.filter(((courseConflict, lecture1, lecture2) -> lecture1 != lecture2))
.penalize(ONE_HARD,
(courseConflict, lecture1, lecture2) -> courseConflict.getConflictCount())
.asConstraint("conflictingLecturesDifferentCourseInSamePeriod");
And what do we get in return for this small change? A nice 17% speedup!
VersionMoves Per secondSpeedBaseline799941.00x (baseline)Precomputed join939371.17x
As is often the case, the best join is a join avoided. Can we avoid more?
Consecutive sequences
The curriculumCompactness constraint makes sure that lectures of the same curriculum are scheduled in consecutive timeslots. In order to do this, it selects all lectures of a curriculum and checks for each lecture if there is another lecture of the same curriculum in the previous or next timeslot. If there is not, a penalty will ensue.
return factory.forEach(Curriculum.class)
.join(Lecture.class,
filtering((curriculum, lecture) -> lecture.getCurriculumSet().contains(curriculum)))
.ifNotExists(Lecture.class,
equal((curriculum, lecture) -> lecture.getDay(), Lecture::getDay),
equal((curriculum, lecture) -> lecture.getTimeslotIndex(), lecture -> lecture.getTimeslotIndex() + 1),
filtering((curriculum, lectureA, lectureB) -> lectureB.getCurriculumSet().contains(curriculum)))
.ifNotExists(Lecture.class,
equal((curriculum, lecture) -> lecture.getDay(), Lecture::getDay),
equal((curriculum, lecture) -> lecture.getTimeslotIndex(), lecture -> lecture.getTimeslotIndex() - 1),
filtering((curriculum, lectureA, lectureB) -> lectureB.getCurriculumSet().contains(curriculum)))
.penalize(ofSoft(2))
.asConstraint("curriculumCompactness");
This is effectively three joins between Curriculum and Lecture with a filter on the timeslot index. If we can rewrite this constraint to avoid these joins, we can get a significant speedup. The adapted constraint could look like this:
return factory.precompute(CurriculumCourseConstraintProvider::curriculumLectureLeft)
.groupBy((curriculum, lecture) -> curriculum,
(curriculum, lecture) -> lecture.getDay(),
ConstraintCollectors.conditionally(
(curriculum, lecture) -> lecture.getDay() != null,
ConstraintCollectors.toConsecutiveSequences(
(Curriculum curriculum, Lecture lecture) -> lecture,
Lecture::getTimeslotIndex)))
.flattenLast(SequenceChain::getConsecutiveSequences)
.filter((curriculum, day, sequence) -> sequence.getLength() == 1)
.penalize(ofSoft(2))
.asConstraint("curriculumCompactness");
We first take advantage of the fact that much of this constraint is shared with the previous constraint. Therefore, we can reuse the same precomputation to get the lectures of each curriculum. Then we can split these lectures by the curriculum and the day that they fall on and then use the advanced toConsecutiveSequences collector to get the consecutive sequences of lectures for each curriculum and day. If a sequence has a length of 1, it means that there is a lecture that is not scheduled next to any other lecture of the same curriculum, and therefore we need to apply a penalty.
The constraint is now a bit more difficult to read, but we get a 40% speedup for our efforts!
In performance optimizations, this is a common pattern: an obvious and straightforward implementation is often not the most performant one. But can we still do better than this?
Replacing unique pairs with maths
The roomOccupancy constraint checks if there are two lectures which share the same room and the same period. This is clearly an impossible situation, and therefore needs to be penalized. The constraint gets it done by penalizing every unique pair of lectures that share the same room and the same period:
return factory.forEachUniquePair(Lecture.class,
equal(Lecture::getRoom),
equal(Lecture::getPeriod))
.penalize(ONE_HARD)
.asConstraint("roomOccupancy");
This is a join, and joins can be expensive when the cross-product becomes large. But those of you who paid attention in maths class might have noticed that this is actually a combinatorial problem. If there are n lectures in the same room and period, there are n choose 2 unique pairs between those lectures, which is equal to n * (n - 1) / 2. This means that we can rewrite the constraint to list all lectures, group them by room and period, count the number of lectures in each group, and apply the combinatorial formula to calculate the number of unique pairs in each group. The adapted constraint would look like this:
return factory.forEach(Lecture.class)
.groupBy(Lecture::getRoom, Lecture::getPeriod, count())
.filter((room, period, count) -> count > 1)
.penalize(ONE_HARD, (room, period, count) -> (count * (count - 1)) / 2)
.asConstraint("roomOccupancy");
Another join replaced, this time for an additional 13% speedup!
What we achieved
Three optimizations. A few hours of work. A 91% speedup and the constraints are still readable, testable, and easy to extend. Compare that to the IncrementalScoreCalculator route: weeks of implementation, no out-of-the-box explainability without serious effort, and constraints that are genuinely painful to add or change. That's not a small thing.
The 17x headline is real, but it is the ceiling of what's possible after an enormous investment. We got to 2x in an afternoon, and that may be just enough.
When to optimize (and when to stop)
Performance work is always about tradeoffs. Here's the approach we'd recommend:
- Start clean: Write straightforward Constraint Streams code first. It's readable, testable, and fast enough for most problems.
- Don't optimize prematurely: If your solver is fast enough, ship it. Every optimization adds complexity.
- Profile before guessing: When you do need to optimize, use Constraint Profiling to find the actual bottlenecks...they're rarely where you expect.
- Optimize one thing at a time: Apply the highest-impact change, benchmark it, then decide if you need more.
- Know when to stop: Diminishing returns kick in fast. A 91% speedup from three targeted changes may already beat chasing a full rewrite. We'd only recommend reaching for
IncrementalScoreCalculatorif you've genuinely exhausted everything else and still can't hit your performance targets. For most problems, you ain't gonna need it. What you will need is ease of maintenance, and the ability to add new constraints without breaking a sweat.
When scheduling works, everything works.
Less waste. More control. Teams that trust the plan.